
XCos
XCosin käyttö on samantyylistä kuin Simulinkin, jota monet ovat koulussa ehkä käyttäneet. Simulinkin hinnoitteluun pätee sama kuin Matlabiin.
XCos löytyy Scilabin valikosta: Applications | Xcos.
Seuraavassa pari yksinkertaista esimerkkiä XCosin käytöstä.
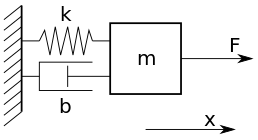
Jousi-massa-vaimennin
Otetaan alla olevan kuvan mukainen järjestelmä, jonka sisääntulona on voima F ja halutaan tietää sen avoimen piirin vaste x.
Parametrit:
k = 20 N/m
b = 9 N/(m/s)
m = 1 kg
F = 0, kun t<1 s ja 1 N, kun t>=1 s.
Järjestelmän liikeyhtälö on:
mx” + bx’ + kx = F, jolle saadaan siirtofunktioksi:
1 / (ms2 + bs + k).
(Laplace-muunnoksesta kiinnostuneet voivat tutkia siirtofunktion muodostamisen vaikkapa täältä.)
XCos-malliksi saadaan:

Lohkon parametreja voidaan muuttaa kaksoisklikkaamalla lohkoa.
Parametrit:
Askel: Step time = 1, Initial value = 0, Final value = 1
Siirtofunktio: Numerator = 1, Denominator = m*s*s+b*s+k
Skooppi: Ymin = 0, Ymax = 0.1, Refres period = 5 (muut oletusarvoilla)
Kello: Period = 0.1, Initialisation time = 0.1
Simulation | Setup: Final integration time = 5.0E00 (muut oletusarvoilla)
Simulation | Set Context: m = 1, b = 9, k = 20
Ja simuloinnin tulos:

Säätöpiiri
Otetaan edellisen kohdan mukainen mekaniikka ja lisätään siihen takaisinkytketty PID-(asema)säätö.
XCos-malliksi saadaan:

Parametrit (uudet tai muutetut):
Askel: Final value = 0.1
Skooppi: Ymax = 0.15
PID: Proportional = 100, Integral = 50, Derivation = 1
Ja simuloinnin tulos:
